- Beiträge
- 9.719
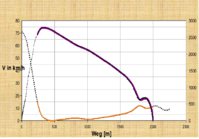
Noch ein Wort zur Genauigkeit der Aufzeichnung:
Hier sei die Geschwindigkeit gleichgeblieben, obwohl das Gelände auf diesen ca. 20 Metern schon wieder leicht ansteigt.
Aber vor allem bremsen bei 70 km/h zusammen mit dem Wind- und Rollwiderstand ca. 2 Kilo das Fahrzeug ab.
Zu erwarten wäre deshalb eine Abnahme der Geschwindigkeit um 0,68 km/h.
Da aus diesen aufgezeichneten Geschwindigkeiten offenbar auch die Wegstrecke ermittelt wird, ist diese allein nur wegen der Ungenauigkeit an dieser Stelle bereits um zu 19cm zu lang.
Dadurch kann man natürlich keine große Genauigkeit an die Auswertung bei solch hohen Geschwindigkeiten erwarten.
Damit ich nicht falsch verstanden werde:
Diese Aufzeichnungen mittels Polar-Rad-Computer stellen das Beste dar, was wir bislang zur Verfügung hatten.
Dank Leonardis riesigem Engagements !")
Code:
Sek km/h Strecke
53 70,4 501,083
54 70,4 520,639Aber vor allem bremsen bei 70 km/h zusammen mit dem Wind- und Rollwiderstand ca. 2 Kilo das Fahrzeug ab.
Zu erwarten wäre deshalb eine Abnahme der Geschwindigkeit um 0,68 km/h.
Da aus diesen aufgezeichneten Geschwindigkeiten offenbar auch die Wegstrecke ermittelt wird, ist diese allein nur wegen der Ungenauigkeit an dieser Stelle bereits um zu 19cm zu lang.
Dadurch kann man natürlich keine große Genauigkeit an die Auswertung bei solch hohen Geschwindigkeiten erwarten.
Damit ich nicht falsch verstanden werde:
Diese Aufzeichnungen mittels Polar-Rad-Computer stellen das Beste dar, was wir bislang zur Verfügung hatten.
Dank Leonardis riesigem Engagements !
Zuletzt bearbeitet: