AW: Chinkara Datensammlung & Selbstbau ?
Diese Konstruktion sieht zwar halsbrecherisch aus, hält jetzt aber schon seit 30.000 km (6 Jahre).
Bastellösungen mit Schrotteilen finde ich in anderen Fällen durchaus OK, da ich meistens bei optischen Schönheitsüberlegungen recht resistent sein kann.
Bei dem Chinkara allerdings kommts mir durchaus auch auf eine schöne Konstruktion an. Daher auch Niro-Rohr 50x1,5 und nicht den Flevo Vierkant.
Wenn ich da bloß vernünftig wäre, sollte ich sofort alle Überlegungen einstellen und einen fertigen Flevo-Racer kaufen.
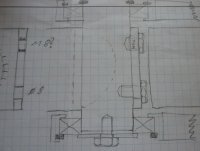
Für den Steuerkopf habe ich bisher 2 Lösungen skizziert:
Rillenkugellager 30x55x9, abgedichtet.jpg
Statische Tragzahl 6,4 kN
mit besserem Lagerabstand
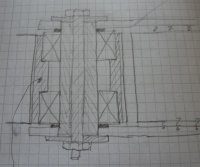
Kegelrollenlager 30x55x19, abgedichtet & unzerlegbar.jpg
Statische Tragzahl 46,5 kN !
dafür aber recht ungünstigen, kurzen Lagerabstand
(korrekte Vorspannung des Lagers notwendig, um die Tragzahl zu erreichen)
Für beide Lagerungen habe ich keine wirkliche Abschätzung der Belastungen gemacht, sondern mal geschaut, was ich von der Geometrie her vernünftig reinbekomme.
Für Erfahrungen und Vergleiche wäre ich dankbar, denen würde ich in diesem Fall wahrscheinlich mehr trauen als einer Lagerauslegung nach Lehrbuchsmeinung.
Und dann gibt's da noch den
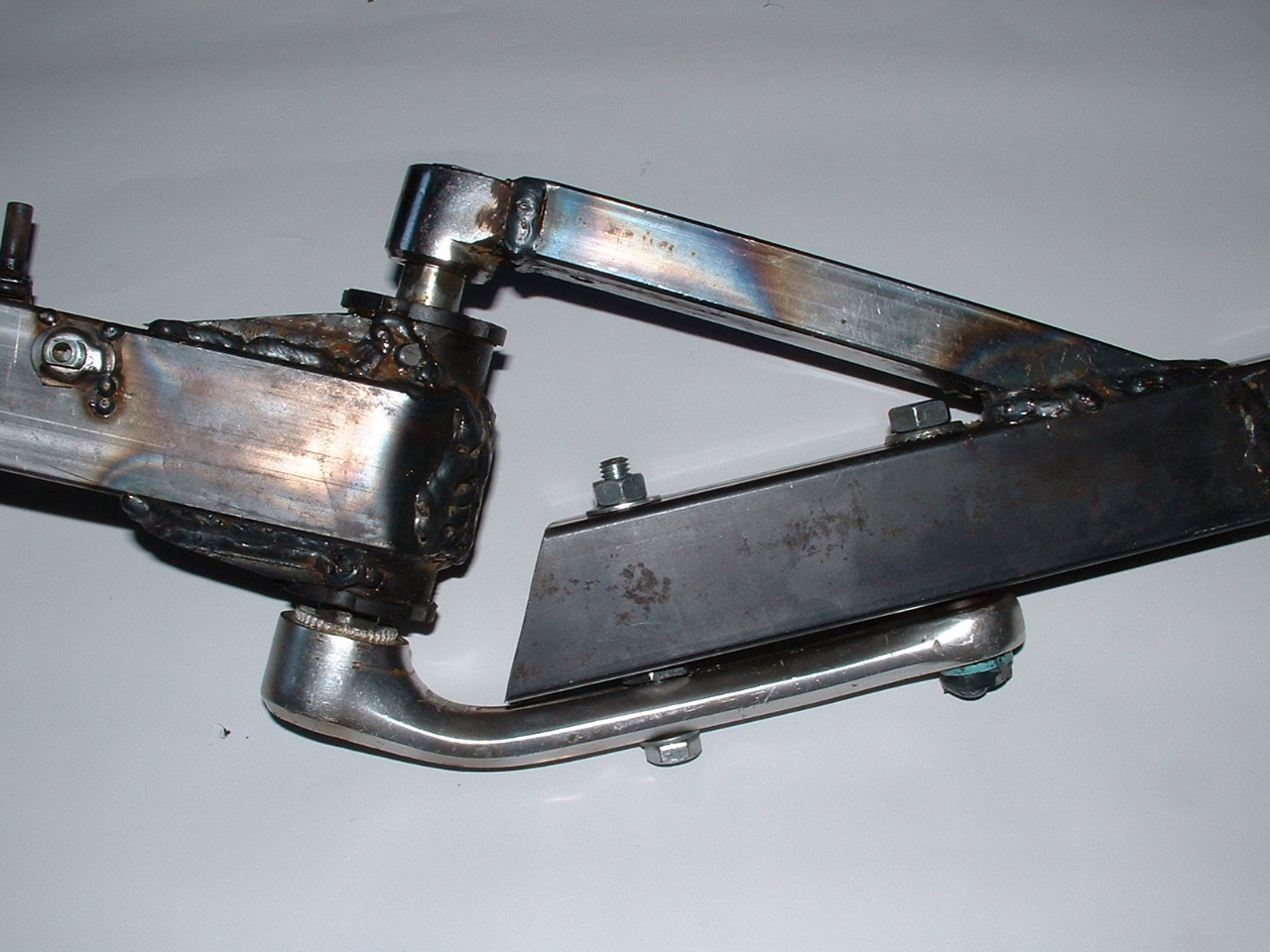
Chinkara Original Steuerkopf.JPG
An dem gefällt mir der Versatz der Rohre nicht, ich möchte die Flucht der Rohre gerne erhalten.
Abgesehen davon ist mir nicht wirklich klar, was sich die Hersteller von dieser Variante versprochen haben. Einfachere Befestigung des Lenkers?
Falls jemand Details zu dieser Konstruktion kennt, wäre ich neugierig mehr zu erfahren. Gleitlager???
Und auch den
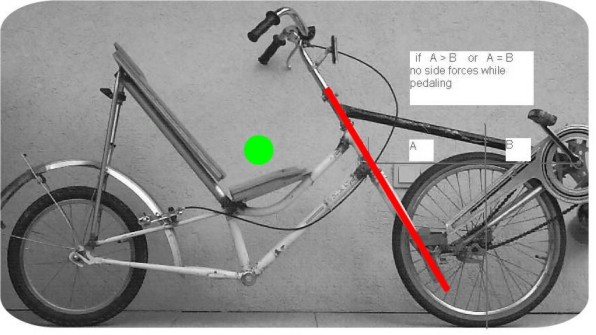
The Worm Steuerkopf.JPG
Hier weiß ich leider nicht, welche Lager verwendet wurden.
Wenn dieser Lagerbolzen hält und nicht auf Dauer die Laschen ausleiert, sind meine Lösungen wahrscheinlich für die Ewigkeit dimensioniert....
Aus meiner Sicht die schönste Lösung, wenn man die Laschen selbst vielleicht noch etwas elganter anbindet.





")