JKL
gewerblich
- Beiträge
- 10.088
In der Serie musst du aber auch an "fahren im Süden mit doppelten Gewicht" denken.Jetzt ist ein kleiner DIY-Kühlkörper dran geschraubt und ihm gehts wieder gut.

Follow along with the video below to see how to install our site as a web app on your home screen.

Anmerkung: This feature currently requires accessing the site using the built-in Safari browser.
In der Serie musst du aber auch an "fahren im Süden mit doppelten Gewicht" denken.Jetzt ist ein kleiner DIY-Kühlkörper dran geschraubt und ihm gehts wieder gut.
Da ich in der Cycle Analyst-Programmiersoftware noch nie einen Torque Sensor konfiguriert habe mag ich mich grad schwer irren, aber ich erwarte eigentlich, das ein Torque-Sensor im Cycle Analyst auch als einfacher PAS-Sensor konfiguriert werden kann. Die Torque-Sensoren haben auch Drehzahlsensoren für die Kadenz und diese Kadenz wird im CAv3 angezeigt.Für mich klar Kadenz gesteuert, Drehmoment finde ich im MTB okay
im VM möchte ich das nicht haben die Gründe dafür hast du ja genannt.
Ideal wäre die Wahl zu haben quasi über eine Umschaltung.
moin moin,
Marc teilte mir mit, dass der Grinmotor für einseitige Achsaufhängung demnächst auch einen Drehmomentsensor im Freilauf hat.
Hier die passende Frage an die Gemeinschaft:
Vor-und Nachteile für drehmomentsensor vs. kadenzgesteuerte Motorleistung.
Mein Kraneis und Bafang-Antrieb haben Kadenzsteuerung und da genieße ich die wählbare volle Unterstützung, gerade wenn ich müde bin.
Eine drehmomentgesteuerte Motorleistung kenne ich noch nicht; ich kann mir vorstellen, dass sie für die allgemeine Tretmoral günstiger ist. Dass es bei ihr nicht zu einer so starken fahrmoralischen Erosion (Charakterabbau) kommt wie bei der kadenzgesteuerten.
Wie sind da die Erfahrungen bzw. was wäre attraktiver am Markt anzubieten?
 The difference I have with the Bafang BBS01 is that the Bosch has a ton more power, at least 200 Watts...
The difference I have with the Bafang BBS01 is that the Bosch has a ton more power, at least 200 Watts... 2.1: Kunden die auf dem Weg zur Arbeit täglich im Stadtverkehr fahren. Schon ein paar Ampeln fressen richtig Körner beim beschleunigen und die Reku-Bremse eines Nabenmotors funktioniert beim regelmässigen bremsen hervorragend (bei mir typisch 8-10% Reku-Leistung) und entlastet die Trommelbremsen merklich.Wenn ich die verschiedenen Möglichkeiten hin-und her überlege, komme ich immer wieder auf diese Widersprüche:
1. Eine Zulassung für 45 kmh für schnelle leichte Velomobile scheint aussichtslos, bleibt also nur:
2. Der Pedelecbetrieb. Hier kommt der schwere und starke Nabenmotorantrieb nur bei Kunden infrage, die täglich viele Höhenmeter überwinden müssen, etwa auf dem Weg zur Arbeit.
Die Ferrofluidkühlung ist keine "Flüssigkühlung" und es braucht dafür nur 5ml Statorade. Der zusätzliche Widerstand von Statorade ist sehr gering (in passender Menge ->nur 5ml, nicht 200-300ml wie bei Ölkühlung).4. Die meisten Fahrer schneller Velomobile werden den Großteil ihres Pensums mühelos jenseits der 25 kmh rein muskulär fahren, was ganz stark gegen jegliche Motorisierung spricht, die Leerlaufwiderstände aufweist (was wir für die Nabenmotoren und erst recht für flüssiggekühlte Nabenmotoren festgestellt haben, auch wenn dies mit elektronischen Tricks kompensiert werden kann).
Yepp!7. Ein starker Nabenmotor mit Kühlung und Rückwärtsgang sowie Rekuperation dagegen nutzt die Möglichkeiten des Velomobiles viel ganzheitlicher aus und taugt auch besser dazu, mit so einem Fahrzeug sein Auto komplett zu ersetzen. Aber leider nur unter der Vorraussetzung, dass die erreichten Geschwindigkeiten legal wären. Genau das ist momentan leider nicht möglich. Selbst eine Zulassung für 45 kmh zwingt mich auf die Straße und Radwege werden plötzlich illegal, was fürn Scheiß
Die Antwort von Justin war absehbar länger und positiv:Bei Gelegenheit werd ich das von Justin bestätigen lassen. Ich erwarte ein: "Ja, natürlich!"
Yes. As long as the torque sensor also has cadence signals present, the CA3 can be setup to control the ebike based on rider pedal cadence even though a torque signal is present too. It will still display on the screen the pedal torque and human wattage even if that's not being used for the motor control. You can setup up mode presets so that one mode is basic PAS control and the other mode is torque control and then very quickly switch back and forth between PAS assist or Torque assist without going into the setup menu. We do this sometimes for demo bikes for people to test ride and quickly appreciate the difference.
Hmm ... es gibt den 4.2 ... hmm ... das Heck des Anhängers ist gut und da passt auch das große Nr-Schild ... hmm ... zusammen gewürfelt ergibt das einen auf 60km/h (keine Autobahn mit so leichten Fz) gedrosselten L5 ... hmm ... 3 Jahre wird mein Kopf noch funktionieren, danach weiß @Marc (wenn er mitmachen sollte) genug, um das weiter zu machen ... hmm ... wenn ein Formenbauer, ein E-Entwickler und einer der Beiden besten Aeor-Entwickler die ich kenne ... hmm ...Eine Zulassung für 45 kmh für schnelle leichte Velomobile scheint aussichtslos
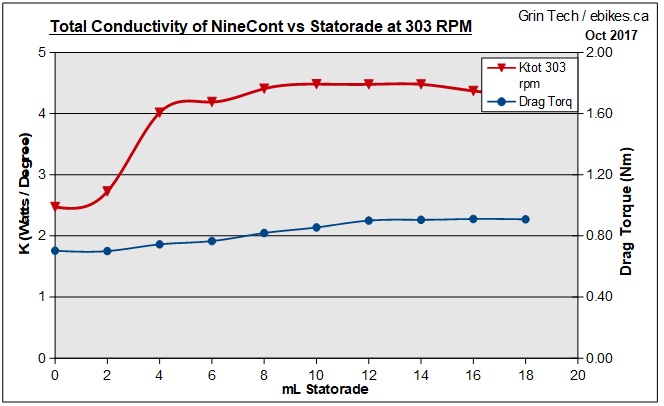
Hier mal grafisch aufbereitete Labormessungen zum gering steigenden Rollwiderstand und stark erhöhter Wärmeleitung durch Statorade, an einem vergleichbaren Nabenmotor:Die Ferrofluidkühlung ist keine "Flüssigkühlung" und es braucht dafür nur 5ml Statorade. Der zusätzliche Widerstand von Statorade ist sehr gering (in passender Menge ->nur 5ml, nicht 200-300ml wie bei Ölkühlung).
Als ich mich vom Räderwerk bzw. velowerk getrennt habe, hat Helge die Rechte am Milan 4.2 von mir und Eggert erhalten. Da habe ich keine Aktien mehr drin. Das Schicksaal des 4.2 liegt also in Helges Hand.Hmm ... es gibt den 4.2 ... hmm ... das Heck des Anhängers ist gut und da passt auch das große Nr-Schild ... hmm ... zusammen gewürfelt ergibt das einen auf 60km/h (keine Autobahn mit so leichten Fz) gedrosselten L5
Für Leute, die es dann doch nicht kaufen würden? Es gilt hier eigentlich wie anderswo auch: wenn Jens oder besser gesagt RO x feste Bestellungen mit 50% Anzahlung auf den geschätzten VK-Preis bekommt, kann man weiter planen. Für Leute, die sich irgendwann, irgendwie vorstellen können, mit einem Doppelsitzer zu fahren würde ich jedenfalls nichts anleiern, weil da meist nichts draus wird. Nennt sich halt Realität ...Bülk .2?
Ich meinte auch nicht den Milan 4.2 ... an dem würde das Kuchenblech (Nr-Schild) auch richtig merde aussehenDas Schicksaal des 4.2 liegt also in Helges Hand.
Nein, vernüftig programmiert ist es mehr wie "zuschaltbarer Rückenwind" und erst in den höchsten Stufen ein Moped.bei Kandenz Steuerung schiebt es wie von Geisterhand, das ist dann wie Moped fahren.
Was für ein System ist das?Ich habe immer zusätzlich mit Daumengas gearbeitet, weil ich die Unterstützung über die Kandenz nicht gescheit steuern kann.
Si ... der Boschmotor ist erste Sahne für sportliche Leute, die eigentlich keinen Motor brauchen.Ich habe ein Up mit Boschmotor und das ist vom Gefühl her erste Sahne.
Ganz einfach: Drehmomentgesteuert funktioniert wie ein Kraftverstärker, kadenzgesteuert eher wie Motor.... Vor-und Nachteile für drehmomentsensor vs. kadenzgesteuerte Motorleistung. ...
Es handelte sich um einen 500 W Puma Nabenmotor.Nein, vernüftig programmiert ist es mehr wie "zuschaltbarer Rückenwind" und erst in den höchsten Stufen ein Moped.
Was für ein System ist das?
Si ... der Boschmotor ist erste Sahne für sportliche Leute, die eigentlich keinen Motor brauchen.
Gruß Jörg