Nochmal zu dem kontroversen Thema Wirkungsgrad und der damit zusammenhängenden Kopplung Mensch/Maschine und der Frage:
Was ist "besser" -
Kettenantrieb mitsamt Pedelec-Motor (zB Leiba Hybrid, Alleweder A6) oder
Generator mitsamt Pedelec-Motor (Podbike)?
Zunächst vorweg: natürlich ist der reine (also unmotorisierte) Kettenantrieb mit seinen 98% (Idealfall) den beiden oben genannten Fällen überlegen, wenn wir im Labor auf dem Prüfstand den Wirkungsgrad messen. Aber um den Kettenantrieb soll es hier nicht gehen, da der reine Kettenantrieb für ein bestimmtes Anforderungsprofil (leichte, unmotorisierte Fahrräder / Velomobile für gesunde, halbwegs trainierte Menschen) eingesetzt wird.
Mit dem Podbike hat man 65kg Systemgewicht und möchte gleichzeitig untrainierten Menschen die Fortbewegung ermöglichen. Der Podbike-Erfinder sagt dazu explizit, dass er hauptsächlich Menschen aus dem Auto herausholen möchte, statt Radler und Velomobilfahrer. Es ist also ein anderes
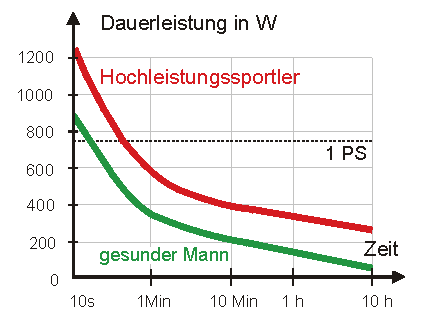
Anforderungsprofil bzw Zielgruppe gegeben. Um diesen Umstand zu visualisieren, kann man zunächst sich folgenden Graph anschauen:
(Quelle:
Leifi)
Wie man sieht, ist für Otto-Normal die Leistungskurve beschränkt und höchstens durch ausreichend Sport etwas nach oben zu verschieben. Aber auch ein Hochleistungssportler hat seine Grenzen. Je nachdem auf was er sich spezialisiert (Maximalkraft vs Ausdauer), wird die rote Kurve auch eine leicht abgewandelte Form haben.
Für die angepeilte Podbike-Zielgruppe
darf diese grüne Linie auch tiefer liegen und die typischen Fahrtenprofile sind: innerstädtische Fahrten, tägliches Pendeln, usw also eher kurze Strecken aber mit Steigungen. Keine Langstreckenfahrten - dafür gibt's Velomobile und die Bahn. Im Idealfall - mit entsprechender Regelungselektronik - sollte es auch eine deutlich abgeflachte Kurve sein, mit der Leistungsspitzen garnicht mehr abgefragt werden aber immernoch als Rückmeldung an den Fahrer
grob abgebildet wird, auf welchem Streckenabschnitt man unterwegs ist (also bergauf
etwas mehr treten vs Leerlauf beim bergab fahren).
Um den Graph aus einer Fahrerperspektive etwas zu veranschaulichen:
Neben dem Getriebewirkungsgrad ist es genauso wichtig, den Wirkungsgrad des Antriebsmotors Mensch zu betrachten.
Jeder Radler kennt das: Fährt man im richtigen Gang, d.h. Trittfrequenz und Pedaldruck sind im persönlich optimalen Bereich, geht es zügig vorwärts, und die Laune bleibt heiter. Ca. 25% der Frühstückskalorien verwandeln die Muskeln jetzt in Vortrieb. Stimmt der Gang jedoch nicht richtig, so muss der Radler den Pedaldruck (das gibt Blei in den Beinen, da der Stoffwechsel nicht mehr optimal funktioniert) oder die Trittfrequenz erhöhen (das ergibt erhöhte Pulswerte, da der Kreislauf jetzt aus dem grünen Bereich läuft).
Der Wirkungsgrad der Muskelmaschine Mensch sinkt unter Umständen auf unter 10%. Produziert wird viel Schweiß und wenig Vortrieb. Die Moral des Radlers sinkt. Neben dem guten Wirkungsgrad der mechanischen Antriebsteile ist es also ebenso wichtig, die Übersetzung den Fahrwiderständen rechtzeitig anzupassen, also schnell und viel zu schalten. Nur so wird der Gesamtwirkungsgrad Frühstück - Mensch - Fahrrad - Geschwindigkeit um den Faktor Erfolg und Spaß bereichert.
Dafür ist die SPEEDHUB 500/14 konstruiert.
(Quelle:
rohloff.de)
Es gibt meiner Ansicht nach einige Faktoren, die den Wirkungsgrad des Menschen, der Kopplung Mensch/Maschine und somit den Gesamtwirkungsgrad direkt beinflussen:
1) Allgemeine körperliche Konstitution: gesunder Mensch vs Eingeschränkte (alt, krank, Tagesform, usw).
2) Das Schaltverhalten des Fahrers. Aber das können wir mal als optimal voraussetzen.
3) Die Leistung pro Zeitraum, wie es im Rohloff-Artikel schon anklingt: der Wirkungsgrad von 25% ist nur dann gegeben, wenn ich im idealen Trittfrequenzbereich (bei entsprechender Last) bin.
Zu 3) ein paar Artikel dazu, warum das so ist:
Muskelleistung und Wirkungsgrad beim Radfahren
Der Wirkungsgrad von Muskelarbeit (Clinical Review 2017)
Leistungssteigerung durch Bike-Fitting
Wie sieht es aber außerhalb dieses idealen Trittfrequenzbereichs aus, den man unweigerlich erreicht, wenn es um größere Steigungen geht? Je nach Streckenprofil ist man dann recht schnell außerhalb des idealen Trittfrequenzbereich (wenn die Übersetzung überhaupt noch reicht).
Kraeuterbutter hat hierzu ein klasse
Video gedreht bei dem der Vergleich zwischen dem Evo-K und einigen Rennradlern am Berg schon ab 10% Steigung sichtbar wird, da er im Vergleich zu den Rennradlern einiges mehr an Gewicht hochwuchten muss. Dieses Phänomen dürfte den VM-Fahrern hier nur allzu gut bekannt sein.
Ich hatte hier mal gefragt: Wie hoch ist der Wirkungsgrad z.B. eines vergleichbaren "Leiba Hybrid" Pedelec Antriebs (auf dem Prüfstand oder geschätzt) und ist der
Gesamtwirkungsgrad unter Einbezug des Abfahrens einer realen Teststrecke und des Anforderungsprofils für die Podbike-Fahrer wirklich a) effizienter und b) sinnvoller?


")