V
VictorR
Ich lade Sie ein, die Möglichkeit zu diskutieren, den neu erfundenen Wandler von translatorischer in rotatorische Bewegung als Linearantrieb des Velomobils einzusetzen:

Follow along with the video below to see how to install our site as a web app on your home screen.

Anmerkung: This feature currently requires accessing the site using the built-in Safari browser.
")
Kann es aber nicht, das gilt für jede fest gekoppelte Wandlung zwischen Linear- und Kreisbewegung. Wenn Du genau am Totpunkt bist, kommst Du hier ohne Drehen am Abtrieb nicht weiter.Es sieht so aus, als würde es von der Endposition aus verlässlich auch aus dem Stand auf der Richtigen Seite weiterlaufen.
Außerdem muss man dann viel mehr Gegenkraft auf das Fahrzeug leiten, was den Rücken, den Sitz und die Steifheit des Fahrzeuges fordert und beim Zurückziehen kann man eher keine Kraft aufbringen. Im Wechseltritt kann man einen bedeutenden Teil der Schiebekraft mit dem Zug am anderen Pedal aufbringen. Überhaupt stelle ich mir das sehr unangenehm vor. Und die Traktion wird auch herausgefordert, wenn man in so großen Schüben die Leistung bringt.Zwei Geräte sehe ich nicht unbedingt, man kann die Beine ja parallel einsetzen, wie beim Ruderrad.
Ist halt nur bei steilen Anstiegen unpraktisch...
Die zwei zahnlosen, schräg stehenden Ovale und die Kugellager am Arm sehen zumindest für mich so aus, als hätten sie das Ziel, den Arm vom Totpunkt aus zu leitenKann es aber nicht, das gilt für jede fest gekoppelte Wandlung zwischen Linear- und Kreisbewegung. Wenn Du genau am Totpunkt bist, kommst Du hier ohne Drehen am Abtrieb nicht weiter.
Dann würde man quasi galoppieren? Wäre zumindest eine Gelegenheit, dem System einen interessanten Namen zu geben. Eine andere Phasenverschiebung als 180 würde dazu führen, dass jedes Bein die meiste Zeit des Zyklus das Pedal schieben und weniger ziehen müsste. Der Name würde "Pull-Push" lauten.Wenn man einen Umsetzer pro Fuß verwendete, könnte man sich auch nicht 180° phasen-verschieben, sondern so weit ab, dass ein Fuß etwas voreilt und vom anderen dann über den Totpunkt geschoben wird. Was ich da vom Bewegungsablauf halte, weiß ich nicht.
Guter Punkt. Diese Funktion übernimmt beim Ruderrad ja der Oberkörper bzw. die Arme.Im Wechseltritt kann man einen bedeutenden Teil der Schiebekraft mit dem Zug am anderen Pedal aufbringen.
Es gibt einen eindeutigen Zusammenhang zwischen Drehwinkel des Abtriebs und Stellung des Antriebs, das geht nicht ohne Umkehrpunkte. Wenn da nicht durch Freiläufe o.ä. "Mehrdeutigkeiten" eingbaut werden, sind die Umkehrpunkte zugleich Totpunkte.Die zwei zahnlosen, schräg stehenden Ovale und die Kugellager am Arm sehen zumindest für mich so aus, als hätten sie das Ziel, den Arm vom Totpunkt aus zu leiten
Vielleicht könnte man da zwei solche Antriebe verwenden. In der Ruderbewegung ist ja eine Phasenverschiebung wahrscheinlich sogar willkommen, und man könnte sie auch noch einstellen, indem man die beiden Antriebe mit einer Synchronkette verbindet und diese um ein paar Zähne vor- oder zurücklegt.Diese Funktion übernimmt beim Ruderrad ja der Oberkörper bzw. die Arme.
An diesem Punkt wäre eine tiefere Erklärung des aktuellen Funktionskonzepts und der vorteilhaften Anwendung am Fahrrad hilfreich.Bisher ist es nur eine Idee, ob und inwieweit das Gerät wirksam sein wird, ist unbekannt.
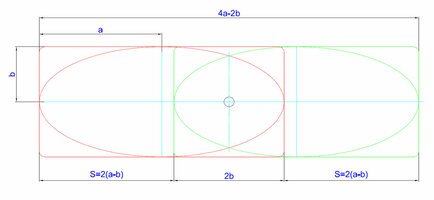
Das Hauptziel war es, eine Linearität der Bewegung mit schnellen Änderungen der Bewegungsrichtungen zu erreichen.
In die Details steige ich lieber nicht ein. Meine Frage in #3 ist von Viktor noch nicht beantwortet.Vielleicht könnte man da zwei solche Antriebe verwenden.
Idee ist, Linearbewegung der Füße/Beine in Rotationsbewegung am Ausgang des Systems umzuwandeln, nicht anders herum.An diesem Punkt wäre eine tiefere Erklärung des aktuellen Funktionskonzepts und der vorteilhaften Anwendung am Fahrrad hilfreich.
Umsetzung der Pedalkurbelbewegung in eine lineare Auf-Ab oder Vorwärts-Rückwärts-Bewegung , und dann zurück am HR?
Dies ist nur eine Idee, ob und in welchem Umfang das Gerät wirksam ist, ist unbekannt.Habt Ihr dazu eine Abschätzung gemacht, welchen Wirkungsgrad das Getriebe im besten Fall erreichen kann?
Bei 50 Watt übertragener Leistung? Bei 100 W?, Bei 250 W?
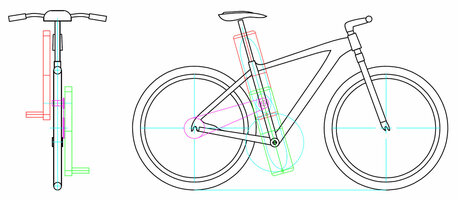
Wo kommt die antreibende Linearbewegung dann her? Bild velo-3.jpg sieht nicht wie ein Ruderrad aus, eher nach Reitrad. Und die Erfindung soll das Auf-und Ab Hopsen bis zum HR homogenisieren? Wobei letzteres schon beim Normalrad höchst umstritten ist....Einleitung einer Linearbewegung. Um letzteres geht es.
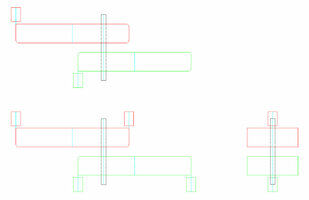
Am Körper des Geräts ist ein Pedal befestigt, das Pedal muss mit dem Fuß betätigt werden, dann bewegt sich der Körper linear entlang der Führungen, wodurch sich die Welle dreht und durch die Kette das Rad dreht.Wo kommt die antreibende Linearbewegung dann her? Bild velo-3.jpg sieht nicht wie ein Ruderrad aus, eher nach Reitrad. Und die Erfindung soll das Auf-und Ab Hopsen bis zum HR homogenisieren? Wobei letzteres schon beim Normalrad höchst umstritten ist....
Na, das wird dann in der Bauform ja sehr wahrscheinlich mit einem Pedal pro Fuß gemeint sein. Und hier soll es ja für den Einbau ins Velomobil sein, das Bild muss man also nicht zu genau nehmen.Bild velo-3.jpg sieht nicht wie ein Ruderrad aus, eher nach Reitrad.
Und dort was genau besser erledigen als bekannte Systeme?Und hier soll es ja für den Einbau ins Velomobil sein,
Was zählst Du alles zu den "bekannten Systemen"? Mit Linearantrieb kann das VM vorn flacher werden.Und dort was genau besser erledigen als bekannte Systeme?
Tretkurbel oder Linearantrieb, i.e. Schlitten + Zugumlenkung wie beim Thys oder dem (wohl gescheiterten) rowcycle.Was zählst Du alles zu den "bekannten Systemen"?