- Beiträge
- 60
Hallo zusammen,
ich habe gerade mein Quest um einen Bafang BBS01 erweitert. Als Display dient ein Eggrider V2, damit ich einfacher konfigurieren kann. Ich denke, dass das System ganz gut läuft, einzig das Anfahren im Berg ist ein Problem. Ich habe vorne nur ein Kettenblatt (59Z), hinten die 11-36-Kassette. Die Übersetzung ist absolut in Ordnung, um jeden Berg auf meinem Arbeitsweg hochzukommen, ohne in den 1. Gang schalten zu müssen. Dumm nur, wenn ich im Berg anhalten muss. Im ersten Gang setzt die Unterstützung erst bei etwa 10 km/h ein. Gibt es einen Parameter, den ich übersehen habe, um das einzustellen? Dass es einen "Wohlfühlbereich" für den Motor zwischen etwa 50-70 1/min gibt, habe ich verstanden.
Da die Schiebehilfe aber auch ab Stillstand funktioniert, könnte es ja trotzdem sein, dass es Einstellungssache ist.
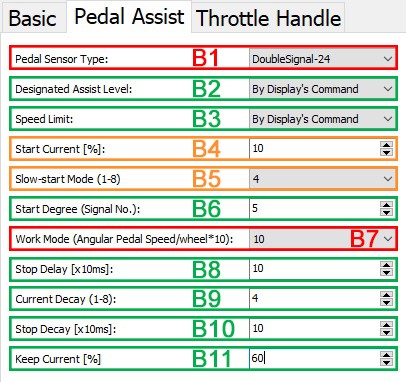
An "Start Current" wollte ich nicht zu viel herumexperimentieren, da ich nur gelesen habe, man solle "vorsichtig" damit umgehen, um den Controller nicht zu schädigen. Ich habe aber keinen Maximalwert gefunden, auf den man gefahrlos hochgehen kann. Zwischen 10 und 20 konnte ich keinen Unterschied feststellen.
Aktuell:
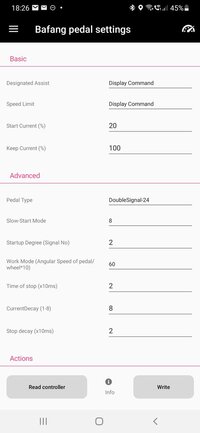
Startup Degree 2
Start Current 20
Keep Current 100
Grüße!
Michael.
ich habe gerade mein Quest um einen Bafang BBS01 erweitert. Als Display dient ein Eggrider V2, damit ich einfacher konfigurieren kann. Ich denke, dass das System ganz gut läuft, einzig das Anfahren im Berg ist ein Problem. Ich habe vorne nur ein Kettenblatt (59Z), hinten die 11-36-Kassette. Die Übersetzung ist absolut in Ordnung, um jeden Berg auf meinem Arbeitsweg hochzukommen, ohne in den 1. Gang schalten zu müssen. Dumm nur, wenn ich im Berg anhalten muss. Im ersten Gang setzt die Unterstützung erst bei etwa 10 km/h ein. Gibt es einen Parameter, den ich übersehen habe, um das einzustellen? Dass es einen "Wohlfühlbereich" für den Motor zwischen etwa 50-70 1/min gibt, habe ich verstanden.
Da die Schiebehilfe aber auch ab Stillstand funktioniert, könnte es ja trotzdem sein, dass es Einstellungssache ist.
An "Start Current" wollte ich nicht zu viel herumexperimentieren, da ich nur gelesen habe, man solle "vorsichtig" damit umgehen, um den Controller nicht zu schädigen. Ich habe aber keinen Maximalwert gefunden, auf den man gefahrlos hochgehen kann. Zwischen 10 und 20 konnte ich keinen Unterschied feststellen.
Aktuell:
Startup Degree 2
Start Current 20
Keep Current 100
Grüße!
Michael.