- Beiträge
- 78
Hallo zusammen!
Nach langem Mitlesen hab ich mich nun auch angemeldet.
Letztes Jahr bin ich in die wunderbare Welt der Liegeräder mit einem Eigenbau Python gestartet. Das Fahren-Lernen war wirklich lustig (wobei nicht ganz schmerzfrei...) und als Fun-Gefährt mit dicken 60-Schwalbe BigApple einfach eine Freude zu fahren.
ABER: als es schneller werden sollte und die Räder gegen Rennrad-Laufradsatz ausgetauscht wurden, war es vorbei mit dem entspannten Fahren- sehr viel kippeliger und gerade bei höheren Geschwindigkeit viel schlechtere Stabilität. Die schweren Laufräder mit den BigApples haben durch den gyroskopischen Effekt wohl doch erheblich zur Fahrstabilität beigetragen. (Bild des Python hab ich auch mit angehängt)
Kurz: es musste ein neuer Eigenbau her, der meine Speedambitionen besser unterstützt. Es sollte wieder Frontantrieb und bewegliches Tretlager haben, da ich das mit den Beine-Lenken ja ausreichend geübt habe und somit Lenkeinflüsse durchs Pedalieren kein Thema für mich ist.
Nach Internet-Recherche taten sich zwei geeignete Konzepte auf:
-CruzBike
-Speculoos
Beim CruzBike störten mich die große Sitzhöhe (bei meinem Python hab ich nie ausgeklickt und beim Anhalten immer nur mit Händen am Boden abgestützt).
Das klassische Soeculoos mit dem asymmetrischen Rahmen und dem Oberrohr über die Schulter hatte mich schon schwer angefixt. Nachdem ich letzten Jahr dann auch noch genau so eins in Leer bei der HPV-WM in natura bestaunen konnte, stand fest sowas muss ich auch bauen.
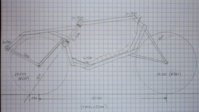
Grundlage meines eigenbau war der Plan den ich unten angehängt habe. Abweichend vom Plan wollte ich aber vorne wie hinten 28-622 Laufräder verwenden (mein RR-Laufradsatz, der mit dem Python nicht fahrbar war).
Mehr dann im nächsten Beitrag.
Nach langem Mitlesen hab ich mich nun auch angemeldet.
Letztes Jahr bin ich in die wunderbare Welt der Liegeräder mit einem Eigenbau Python gestartet. Das Fahren-Lernen war wirklich lustig (wobei nicht ganz schmerzfrei...) und als Fun-Gefährt mit dicken 60-Schwalbe BigApple einfach eine Freude zu fahren.
ABER: als es schneller werden sollte und die Räder gegen Rennrad-Laufradsatz ausgetauscht wurden, war es vorbei mit dem entspannten Fahren- sehr viel kippeliger und gerade bei höheren Geschwindigkeit viel schlechtere Stabilität. Die schweren Laufräder mit den BigApples haben durch den gyroskopischen Effekt wohl doch erheblich zur Fahrstabilität beigetragen. (Bild des Python hab ich auch mit angehängt)
Kurz: es musste ein neuer Eigenbau her, der meine Speedambitionen besser unterstützt. Es sollte wieder Frontantrieb und bewegliches Tretlager haben, da ich das mit den Beine-Lenken ja ausreichend geübt habe und somit Lenkeinflüsse durchs Pedalieren kein Thema für mich ist.
Nach Internet-Recherche taten sich zwei geeignete Konzepte auf:
-CruzBike
-Speculoos
Beim CruzBike störten mich die große Sitzhöhe (bei meinem Python hab ich nie ausgeklickt und beim Anhalten immer nur mit Händen am Boden abgestützt).
Das klassische Soeculoos mit dem asymmetrischen Rahmen und dem Oberrohr über die Schulter hatte mich schon schwer angefixt. Nachdem ich letzten Jahr dann auch noch genau so eins in Leer bei der HPV-WM in natura bestaunen konnte, stand fest sowas muss ich auch bauen.
Grundlage meines eigenbau war der Plan den ich unten angehängt habe. Abweichend vom Plan wollte ich aber vorne wie hinten 28-622 Laufräder verwenden (mein RR-Laufradsatz, der mit dem Python nicht fahrbar war).
Mehr dann im nächsten Beitrag.