

- Beiträge
- 4.582
The part on wich the front linkrod attaches needs to be lenghtend forward quite a bit. It is just a bit of angle Alu. Simple and straight. The pivotpoint on the plate is 90 mm forward of the heart of the strut on the Milan GT, on a Quest this is 85mm. On my Plywood version it is 110mm.
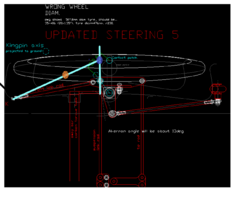
U need to extend the suspension linkrod visualy outward over its pivot point. Then also visualy extend the front linkrod outward over its pivot point. If u draw on 10cm on both that is enough. Just extend in a straight line. The lines will cross, and there is your virtual pivot point. As shown in the video this point moves as the steering moves, but lets forget about that for now. Just with the wheel straight. As shown with turkoise lines.
The line of the suspension link outward is fixed. Difficult to change something with that.
The forward linkrod can be changed. U can change the position of the front pivot on the wheelwell, u can change the position on the plate mounted to the strut. The current position near the suspension strut is way to far rearward. If u move it forward, so there is 85mm between the centre hole and the forward one, the scrubradius will get smaller. Within the width of the strutplate u can also play with its sideways position.
I suggest some backwards engeneering. Draw the zero scrubradius line on the outward extension of the suspension link. Draw the pivot point on of the forward link on the strutplate. Now connect those two and draw the line on, in the same direction, until it hits the wheelwell. There should be the mount to the shell. On the drawing i made the pivot point blue and the forward linkrod mount orange.
On many velomobiles the mounting hole of the rodend that holds the forward linkrod is mounted slightly more outward than both other holes. This gets the scrub radius near zero. A different sollution is to put the mounting point on the wheelwell further back, as is done on the Mango. Both movements alter the angle between the suspension and forward linkrod lines.
My drawing is not as accurate as yours , but to visualize the concept. If u shift the orange point outward, the blue dot will also move outward. If u move the front pivot towards the rear, and do not alter the blue point, the orange one will shift back also.
Ackerman from the blue dot to the rearwheel. That should work out.
U need to extend the suspension linkrod visualy outward over its pivot point. Then also visualy extend the front linkrod outward over its pivot point. If u draw on 10cm on both that is enough. Just extend in a straight line. The lines will cross, and there is your virtual pivot point. As shown in the video this point moves as the steering moves, but lets forget about that for now. Just with the wheel straight. As shown with turkoise lines.
The line of the suspension link outward is fixed. Difficult to change something with that.
The forward linkrod can be changed. U can change the position of the front pivot on the wheelwell, u can change the position on the plate mounted to the strut. The current position near the suspension strut is way to far rearward. If u move it forward, so there is 85mm between the centre hole and the forward one, the scrubradius will get smaller. Within the width of the strutplate u can also play with its sideways position.
I suggest some backwards engeneering. Draw the zero scrubradius line on the outward extension of the suspension link. Draw the pivot point on of the forward link on the strutplate. Now connect those two and draw the line on, in the same direction, until it hits the wheelwell. There should be the mount to the shell. On the drawing i made the pivot point blue and the forward linkrod mount orange.
On many velomobiles the mounting hole of the rodend that holds the forward linkrod is mounted slightly more outward than both other holes. This gets the scrub radius near zero. A different sollution is to put the mounting point on the wheelwell further back, as is done on the Mango. Both movements alter the angle between the suspension and forward linkrod lines.
My drawing is not as accurate as yours , but to visualize the concept. If u shift the orange point outward, the blue dot will also move outward. If u move the front pivot towards the rear, and do not alter the blue point, the orange one will shift back also.
Ackerman from the blue dot to the rearwheel. That should work out.
Anhänge
Zuletzt bearbeitet:











