Was bedeutet denn das "Center" im VCS und wo ist die zweite (virtuelle?) Achse?
Den Sitz weggedacht, und sich vorgestellt Fahrtrichtung des Fahrzeugs wäre nach links, dann ....
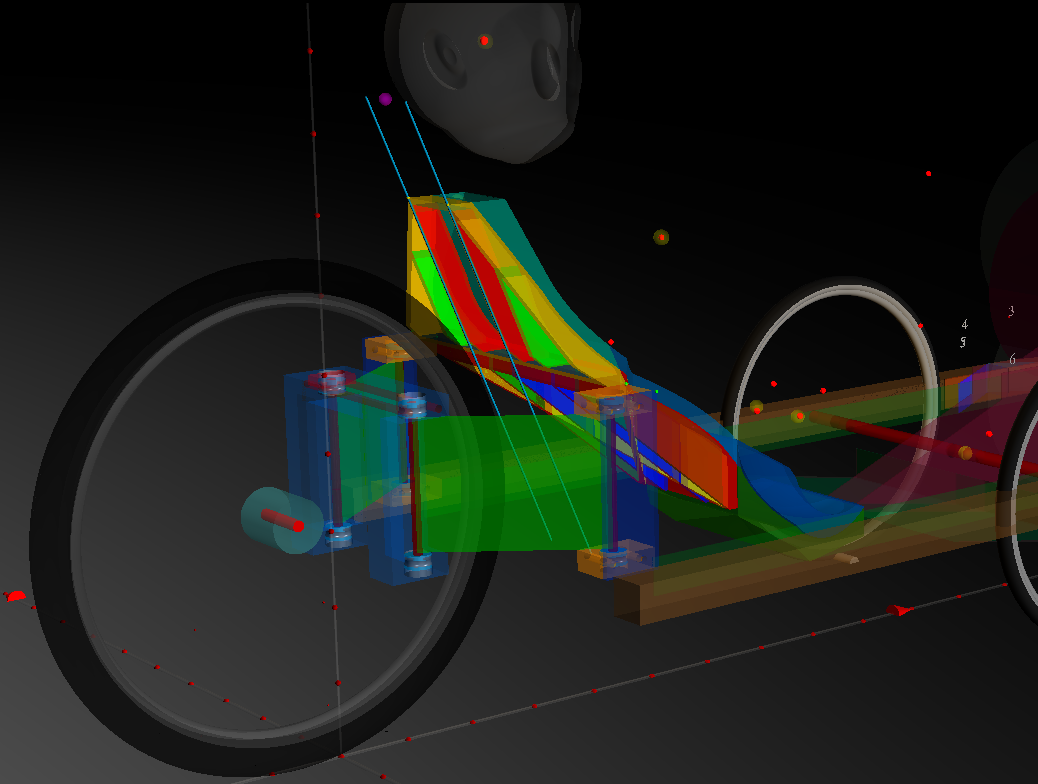
... wäre das hier abgebildete VCS ein Vorderrad-VCS das als Vorderrad-Lenkungs-VCS fungiert. So, onTopic
")
!
Lenken täte das Ungetüm indem es mit den beiden Flügeln wedelte( Drachenflügel sind grün ). Wenn man sich das genau vorstellt, with a bit of passion, dann wird klar daß sich das Rad ...
... nicht nur um eine mehr oder weniger vertikale Lenkachse durch den Radmittelpunkt dreht
... sondern sich beim Lenken auch noch seitlich verschiebt. Je nach Kurve entweder nach rechts oder links, d.h. auch der Reifenaufstandspunkt nach rechts oder links. Die virtuelle Lenkachse verändert also ihre Position relativ zum Fahrrad! Sie ist nicht in fixierter & unbeweglicher Position am Rahmen angebaut wie sonst bei jedem anderen Fahrrad, sondern, via Drachenflügeln, schwenkbar, variabel, ... virtuell finde ich etwas unpassend.
Was vielleicht unklar ist, ich bin vielleicht betriebsblind weil ich das Bild ja programmiert( nicht gemalt ... ) habe: Das Laufrad bzw. desssen rote Achse ist unbeweglich zwischen den beiden blauen Klötzen eingespannt, lediglich etwas verschoben. Das entsprechende Trivial-Bauteil habe ich weggelassen damit man den Wesenskern der Konstruktion besser erkennt. So, langer Text ..........aber er enthält schon mal das Wichtigste so ziemlich komplett. Den Text gewaltig zu kürzen wäre bestimmt möglich und SEHR sinnvoll, im nächsten Anlauf dann. Beste Grüße!