- Beiträge
- 370
Knicklenker - ein subjektiver Überblick
Nach einigen Testfahrten mit den Urgesteinen der Knicklenker-Szene (Flevobike und Airbike), habe
ich in den 90er schon einmal ein Knicklenker-Versuch gewagt, nach dem Vorbild von Israel Urieli
Sein Grasshopper 1 erschien mir für ein reisetaugliches Liegerad ideal kompakt.
Mein damals 2x 406mm bereifter Protoyp fand dann aber sehr schnell denn Weg in den Schrottcontainer...
Jahre später stieß ich per Zufall auf den Knicklenker von Nik Vatin, einfach aber innovativ sein Fahrzeug.
Sein youtube Kanal sofabike ist sehr unterhaltsam!
Interessant sind ebenfalls die Phyton-Fahrzeuge, die Jürgen Marges eindrucksvoll dokumentiert, vielen Dank hierfür.
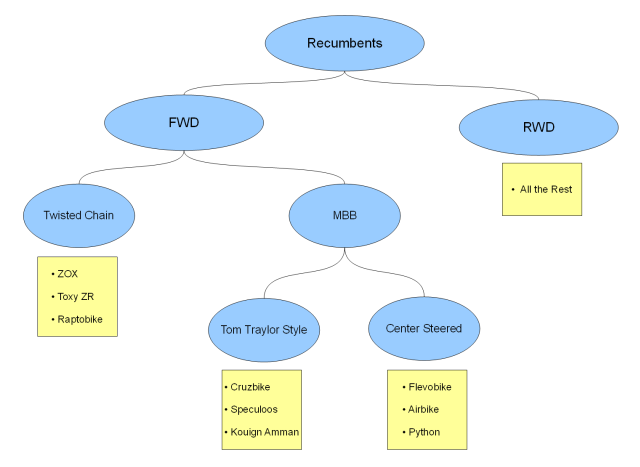
Mit Interesse habe ich auch Maria Parkers Langstrecken-Fahrten auf den "Knicklenkern" von Cruzbike beobachtet. Wobei der Terminus "Knicklenker" bei den Cruzbikes schon weit hergeholt ist, es handelt sich eigentlich ursprünglich um einen Rennrad-Rahmen mit angesetztem Tretlagerausleger, der beim Lenken mitschwenkt. Im amerikanischen Sprachgebrauch "moving bottom bracket" genannt.
Statt Knicklenker könnte man nun auch den engl. Begriff "center steered recumbent" verwenden...
Fragen, die sich aufdrängen
Nachdem ich diese Fahrzeuge und noch weitere (u.a. Zockra) eingehend begutachtet hatte, stellten sich mir drei Fragen:
Knicklenker mit VCS (Virtual Center Steering)
Die tiefliegenden Phytons mit grossen Laufrädern waren mein Favorit, doch mit diesem grossen negativen Nachlauf von bis zu -300mm (=Vorlauf) konnte ich mich überhaupt nicht anfreunden.
An diesem Punkt kam mir mein stillgelegtes Hecklenker-Projekt mit Längslenker-Lenkung zur Hilfe.
Würde man ein Phyton ähnliches Gerät mit Längslenkern ausstatten, könnte man eine Lenkgeometrie mit ausreichend steilem Lenkkopfwinkel und ordentlich Nachlauf erzielen, d.h. sehr stabilen Geradeauslauf auch bei hohen Geschwindigkeiten (Punkt 1 der Fragen von oben):

Hierbei handelt es sich um eine virtuelle Lenkgeometrie (ich habe sie VCS benannt - Virtual Center Steering), mit dem "Gabeldrehpunkt" in der Momentanpol-Achse, höhrt sich vielleicht kompliziert an, ist aber einfach:

Dann kommen wir zu Punkt 2 der Fragen. Knicklenker drehen beim Treten in die Pedale stark zur Seite.
Könnte man den Hebel zwischen Pedalmitte und Fahrzeugmitte (unerwünschter Hebel beim Treten) verkleinern oder gar gänzlich vermeiden, wäre das Problem Berg gelöst. Dieser Hebel lässt sich verkleinern und auch vermeiden, hört sich an wie Zauberei ist aber mit der virtuellen Lenkung machbar.
Denn wenn das Pedal belastet wird, also zur Seite (zur Fahrzeugmitte) gedreht wird, bewegt sich der Momentanpol durch die gewählte Geometrie sehr schnell zum belasteten Pedal hin und der störende Hebel nimmt sehr schnell ab. In der Praxis pendelt das Vorderrad bergauf schnell hin und her (mit der Trittfrequenz) allerdings bei wirklich kleinen Amplituden.
Bei Gelegenheit werde ich hierzu ein Video machen.
Prototyp / Fahrmuster
Nachdem die Idee geboren war, musste schnell ein Fahrmuster her um dies zu überprüfen. Drei Stunden CAD und zwei Tage Werkstatt mussten reichen um den Kopf frei zu bekommen. Gebaut für 50 km, so dachte ich:

Fazit
Nach mittlerweile fast 8000 km mit meinem Eisenschwein (hat immerhin über 20 kg / die 50km Idee hatte sich sehr schnell erledigt) bin ich von diesem Konzept fast überzeugt.
Fahrstabilität auch bei 90 km/h, locker bergauf trotz 20kg habe ich mittlerweile nur noch eine offene Frage:
Was macht meine schlecht trainierte Schulter- und Nacken-Muskulatur (24 Jahre Liegerad/Velomobil) auf den richtigen Langstrecken, denn die Arme haben am Lenkbügel mehr zu tun (zumindest bei mir).
Es geht weiter...
Harald Meckelburg
Nach einigen Testfahrten mit den Urgesteinen der Knicklenker-Szene (Flevobike und Airbike), habe
ich in den 90er schon einmal ein Knicklenker-Versuch gewagt, nach dem Vorbild von Israel Urieli
Sein Grasshopper 1 erschien mir für ein reisetaugliches Liegerad ideal kompakt.
Mein damals 2x 406mm bereifter Protoyp fand dann aber sehr schnell denn Weg in den Schrottcontainer...
Jahre später stieß ich per Zufall auf den Knicklenker von Nik Vatin, einfach aber innovativ sein Fahrzeug.
Sein youtube Kanal sofabike ist sehr unterhaltsam!
Interessant sind ebenfalls die Phyton-Fahrzeuge, die Jürgen Marges eindrucksvoll dokumentiert, vielen Dank hierfür.
Mit Interesse habe ich auch Maria Parkers Langstrecken-Fahrten auf den "Knicklenkern" von Cruzbike beobachtet. Wobei der Terminus "Knicklenker" bei den Cruzbikes schon weit hergeholt ist, es handelt sich eigentlich ursprünglich um einen Rennrad-Rahmen mit angesetztem Tretlagerausleger, der beim Lenken mitschwenkt. Im amerikanischen Sprachgebrauch "moving bottom bracket" genannt.
Statt Knicklenker könnte man nun auch den engl. Begriff "center steered recumbent" verwenden...
Fragen, die sich aufdrängen
Nachdem ich diese Fahrzeuge und noch weitere (u.a. Zockra) eingehend begutachtet hatte, stellten sich mir drei Fragen:
- sind Knicklenker (ich bleibe bei dem Begriff) auch bei hohen Geschwindigkeiten stabil (>80 km/h) ?
- sind Knicklenker am Berg leistungsfähig (geringe Trittfrequenz, hohe Pedalkräfte) ?
- sind Knicklenker mit geringer Sitzhöhe und grossen Laufräder möglich ?
Knicklenker mit VCS (Virtual Center Steering)
Die tiefliegenden Phytons mit grossen Laufrädern waren mein Favorit, doch mit diesem grossen negativen Nachlauf von bis zu -300mm (=Vorlauf) konnte ich mich überhaupt nicht anfreunden.
An diesem Punkt kam mir mein stillgelegtes Hecklenker-Projekt mit Längslenker-Lenkung zur Hilfe.
Würde man ein Phyton ähnliches Gerät mit Längslenkern ausstatten, könnte man eine Lenkgeometrie mit ausreichend steilem Lenkkopfwinkel und ordentlich Nachlauf erzielen, d.h. sehr stabilen Geradeauslauf auch bei hohen Geschwindigkeiten (Punkt 1 der Fragen von oben):
Hierbei handelt es sich um eine virtuelle Lenkgeometrie (ich habe sie VCS benannt - Virtual Center Steering), mit dem "Gabeldrehpunkt" in der Momentanpol-Achse, höhrt sich vielleicht kompliziert an, ist aber einfach:
Dann kommen wir zu Punkt 2 der Fragen. Knicklenker drehen beim Treten in die Pedale stark zur Seite.
Könnte man den Hebel zwischen Pedalmitte und Fahrzeugmitte (unerwünschter Hebel beim Treten) verkleinern oder gar gänzlich vermeiden, wäre das Problem Berg gelöst. Dieser Hebel lässt sich verkleinern und auch vermeiden, hört sich an wie Zauberei ist aber mit der virtuellen Lenkung machbar.
Denn wenn das Pedal belastet wird, also zur Seite (zur Fahrzeugmitte) gedreht wird, bewegt sich der Momentanpol durch die gewählte Geometrie sehr schnell zum belasteten Pedal hin und der störende Hebel nimmt sehr schnell ab. In der Praxis pendelt das Vorderrad bergauf schnell hin und her (mit der Trittfrequenz) allerdings bei wirklich kleinen Amplituden.
Bei Gelegenheit werde ich hierzu ein Video machen.
Prototyp / Fahrmuster
Nachdem die Idee geboren war, musste schnell ein Fahrmuster her um dies zu überprüfen. Drei Stunden CAD und zwei Tage Werkstatt mussten reichen um den Kopf frei zu bekommen. Gebaut für 50 km, so dachte ich:
Fazit
Nach mittlerweile fast 8000 km mit meinem Eisenschwein (hat immerhin über 20 kg / die 50km Idee hatte sich sehr schnell erledigt) bin ich von diesem Konzept fast überzeugt.
Fahrstabilität auch bei 90 km/h, locker bergauf trotz 20kg habe ich mittlerweile nur noch eine offene Frage:
Was macht meine schlecht trainierte Schulter- und Nacken-Muskulatur (24 Jahre Liegerad/Velomobil) auf den richtigen Langstrecken, denn die Arme haben am Lenkbügel mehr zu tun (zumindest bei mir).
Es geht weiter...
Harald Meckelburg
Zuletzt bearbeitet:

") - danke für den Hinweis.
- danke für den Hinweis.