

- Beiträge
- 836
Hallo
Ich baue schon seit gefühlt ewig an Pedelecantrieben und stelle fest das nicht unbedingt die Leistung sondern mehr das Fahrgefühl entscheidend ist ob man mehr oder weniger Freude beim Fahren hat . Bei fertigen Pedelecs mit Tretlagermotore mit Bosch und Co hat sich die Drehmomenterkennung durchgesetzt . Bei Nabenmotore wird meist eine reine PAS-Steuerung verbaut . Wenn man schon länger auch im Pedelecforum als Selbstbauer oder Nachrüster unterwegs ist stellt man fest das zB der Bafang immer mehr vom TSDZ2 abgelöst wird . Es gibt natürlich Gründe warum es beim Nabenmotor immer wieder bei der PAS-Steuerung bleibt aber ein Nabenmotor kombiniert mit Drehmomentsteuerung macht richtig viel Spaß . Leider ist so ein Drehmomentlager oft teuer und benötigt oft einen dazugehörigen Controller was das ganze nicht günstiger macht . Ich will hier kein für und wieder für Drehmomentsteuerung eröffnen sondern ein Tretlager für ein Trike , Quad oder Velocar durch zuhilfenahme alter Mittelmotore aufbauen .
Das Funktionsprinzip erfolgt nicht über eine verbiegbare Tretlagerwelle oder ähnliches sondern eine interne Übersetzung eines Planetengetriebe die die Gegenkraft misst . Um ein Planetengetriebe mal ausfürlich erklärt zu bekommen habe ich das hier gefunden und ist besser wie wenn ich das versuche zu erklären . Vorallem die kleinen Videos sind schön anschaulich . Und zum vormerken , das Kettenblatt ist das Hohlrad und die Tretlagerwelle der Planetenträger und das Sonnenrad wird festgehalten , also fast festgehalten .
 www.tec-science.com
Wie schon geschrieben werde ich die Getriebebauteile aus alten Mittelmotore ( Yamaha PAS ) verbauen , wie auch die grundsätzliche Idee übernehmen .
www.tec-science.com
Wie schon geschrieben werde ich die Getriebebauteile aus alten Mittelmotore ( Yamaha PAS ) verbauen , wie auch die grundsätzliche Idee übernehmen .
Mein Ersatzteillager ist dafür reichlich gefüllt .
.JPG")
Das Gehäuse wird aus Aluprofile und Rundstücke gebaut
.JPG")
Die Sensorik baue ich aus einen Gasgriff und PAS-Sensor .
.JPG")
Die erste Überlegung war wie ich mein Tretlager später am Rahmen befestigen könnte . Ich habe bei allen Trikes und beim Velocar 40x40er Rechteckrohr genutzt . Meine Idee ist dazu ein U-Profil als Schlitten zu verwenden mit 50x50x5
.JPG")
Dieses passt dann gut auf das Qudratrohr und kann verschoben werden .
.JPG")
Wie man das dann befestigt ob mit schrauben von oben , seitlich oder auch durch Klemmspanner lasse ich mal offen .
Mein Tretlager wird also auf den Schuh aufgebaut sodass die Tretlagerwelle höher liegt als das Rahmenrohr . Das muß man später meim Rahmenbau berücksichtigen .
Was soll mein Tretlager alles können und wofür ist das nützlich ?
-Kurbelfreilauf : Hier besteht zb. die Möglichkeit auch bei Verwendung eines Hinterrades mit Rücktrittbremse die Pedale richtig zu stellen .
Dies ist beim Trike oft wichtiger wie beim Fahrrad . Rücktrittbremse ist aber so nicht mehr möglich .
Auch die Verwendung eines im Kettenstrang verbauten Motors wär so möglich oder ein klassischer Kettenantriebsmotor .
Aber es besteht auch die Möglichkeit den Kurbelfreilauf zu sperren wenn man zb was mir unwarscheinlich erscheint eine
Rücktrittbremse verbaut .
-Drehzahlerhöhung
am Kettenblatt: Ob das jetzt sinnvoll ist lasse ich dahingestellt aber das Kettenblatt kann kleiner ausfallen vorallem bei kleinen Laufrädern
kann das ein Vortel sein .
-Drehmomenterkennung : für mich der wichtigste Vorteil .
-PAS Erkennung : Wichtig da eine Drehmomenterkennung sich ohne PAS-Erkennung nicht gut fährt . Beide Werte werden zur optimale Steuerung gebraucht .
-Rep.freundlich : Ich kann jede einzelne Koponente austauschen . Ein teures Drehmomentlager wenn mal kaputt ist muß man es komplett tauschen weil es fast
nicht instandgesetzt werden kann . Evtl mal ein Kabelbruch oder Kugellager aber wenn die Elektronik einen Fehler hat ist das nicht einfach .
Gestern habe ich das Gehäuse aufgebaut , ok schön ist anders aber dafür reine Handarbeit . Wenn man da eine Möglichkeit hat dies aus einem Klotz zu fräsen wär das ein Traum .
.JPG")
Auch mein Deckel ist fertig und das Ding passt gut auf ein 40x40er Rohr .
.JPG")
.JPG")
Im nächsten Schritt werde ich am Innenleben arbeiten .
Grüße
Ich baue schon seit gefühlt ewig an Pedelecantrieben und stelle fest das nicht unbedingt die Leistung sondern mehr das Fahrgefühl entscheidend ist ob man mehr oder weniger Freude beim Fahren hat . Bei fertigen Pedelecs mit Tretlagermotore mit Bosch und Co hat sich die Drehmomenterkennung durchgesetzt . Bei Nabenmotore wird meist eine reine PAS-Steuerung verbaut . Wenn man schon länger auch im Pedelecforum als Selbstbauer oder Nachrüster unterwegs ist stellt man fest das zB der Bafang immer mehr vom TSDZ2 abgelöst wird . Es gibt natürlich Gründe warum es beim Nabenmotor immer wieder bei der PAS-Steuerung bleibt aber ein Nabenmotor kombiniert mit Drehmomentsteuerung macht richtig viel Spaß . Leider ist so ein Drehmomentlager oft teuer und benötigt oft einen dazugehörigen Controller was das ganze nicht günstiger macht . Ich will hier kein für und wieder für Drehmomentsteuerung eröffnen sondern ein Tretlager für ein Trike , Quad oder Velocar durch zuhilfenahme alter Mittelmotore aufbauen .
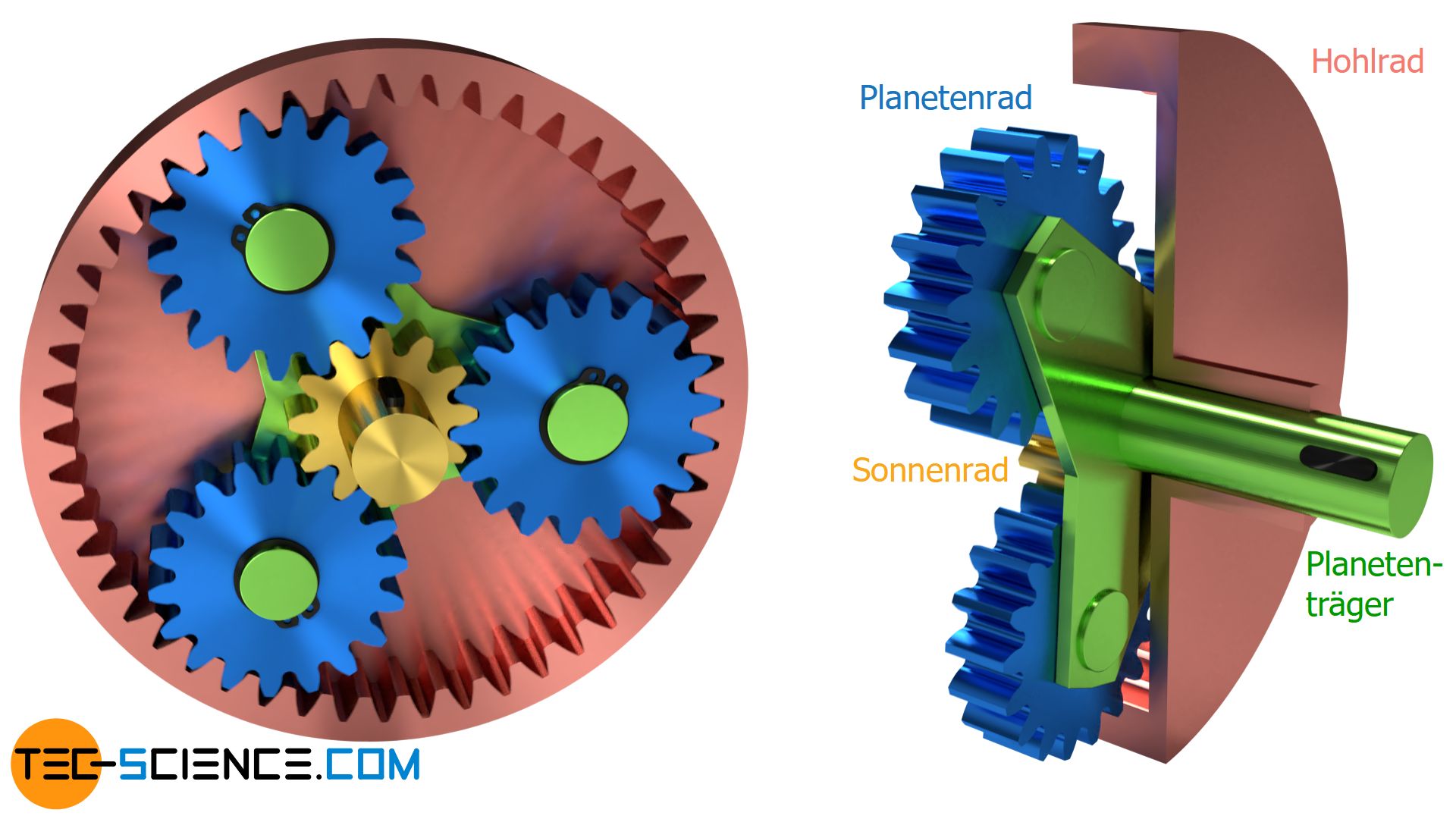
Das Funktionsprinzip erfolgt nicht über eine verbiegbare Tretlagerwelle oder ähnliches sondern eine interne Übersetzung eines Planetengetriebe die die Gegenkraft misst . Um ein Planetengetriebe mal ausfürlich erklärt zu bekommen habe ich das hier gefunden und ist besser wie wenn ich das versuche zu erklären . Vorallem die kleinen Videos sind schön anschaulich . Und zum vormerken , das Kettenblatt ist das Hohlrad und die Tretlagerwelle der Planetenträger und das Sonnenrad wird festgehalten , also fast festgehalten .
Wie funktioniert ein Planetengetriebe? - tec-science
Ein Planetengetriebe ist ein Umlaufgetriebe, bei dem sich mehrere Zahnräder (Planetenräder) auf einem zentralen Zahnrad (Sonnenrad) abwälzen.
www.tec-science.com
Mein Ersatzteillager ist dafür reichlich gefüllt .
Das Gehäuse wird aus Aluprofile und Rundstücke gebaut
Die Sensorik baue ich aus einen Gasgriff und PAS-Sensor .
Die erste Überlegung war wie ich mein Tretlager später am Rahmen befestigen könnte . Ich habe bei allen Trikes und beim Velocar 40x40er Rechteckrohr genutzt . Meine Idee ist dazu ein U-Profil als Schlitten zu verwenden mit 50x50x5
Dieses passt dann gut auf das Qudratrohr und kann verschoben werden .
Wie man das dann befestigt ob mit schrauben von oben , seitlich oder auch durch Klemmspanner lasse ich mal offen .
Mein Tretlager wird also auf den Schuh aufgebaut sodass die Tretlagerwelle höher liegt als das Rahmenrohr . Das muß man später meim Rahmenbau berücksichtigen .
Was soll mein Tretlager alles können und wofür ist das nützlich ?
-Kurbelfreilauf : Hier besteht zb. die Möglichkeit auch bei Verwendung eines Hinterrades mit Rücktrittbremse die Pedale richtig zu stellen .
Dies ist beim Trike oft wichtiger wie beim Fahrrad . Rücktrittbremse ist aber so nicht mehr möglich .
Auch die Verwendung eines im Kettenstrang verbauten Motors wär so möglich oder ein klassischer Kettenantriebsmotor .
Aber es besteht auch die Möglichkeit den Kurbelfreilauf zu sperren wenn man zb was mir unwarscheinlich erscheint eine
Rücktrittbremse verbaut .
-Drehzahlerhöhung
am Kettenblatt: Ob das jetzt sinnvoll ist lasse ich dahingestellt aber das Kettenblatt kann kleiner ausfallen vorallem bei kleinen Laufrädern
kann das ein Vortel sein .
-Drehmomenterkennung : für mich der wichtigste Vorteil .
-PAS Erkennung : Wichtig da eine Drehmomenterkennung sich ohne PAS-Erkennung nicht gut fährt . Beide Werte werden zur optimale Steuerung gebraucht .
-Rep.freundlich : Ich kann jede einzelne Koponente austauschen . Ein teures Drehmomentlager wenn mal kaputt ist muß man es komplett tauschen weil es fast
nicht instandgesetzt werden kann . Evtl mal ein Kabelbruch oder Kugellager aber wenn die Elektronik einen Fehler hat ist das nicht einfach .
Gestern habe ich das Gehäuse aufgebaut , ok schön ist anders aber dafür reine Handarbeit . Wenn man da eine Möglichkeit hat dies aus einem Klotz zu fräsen wär das ein Traum .
Auch mein Deckel ist fertig und das Ding passt gut auf ein 40x40er Rohr .
Im nächsten Schritt werde ich am Innenleben arbeiten .
Grüße
.JPG")
.JPG")
.JPG")
.jpg")
.JPG")
.JPG")
.JPG")
.jpg")
.JPG")

.JPG")