

C
Ceeone
Hello Hein, Titan Wolf, trike like (Martin?) And Stephan (shs2_de)
It's been a few weeks since I've been able to say what I've done with the idea of a tiltable space frame trike, and I have a few things to share. I have built another new prototype tilting mechanism and have already developed a new version. Interestingly enough, my latest designs are very similar to what Stephan (shs2_de) worked on at the beginning of this forum. It might be interesting for Stephan and others to see a modification of this suspension system. I've also spent a considerable amount of time with my husband and a friend remodeling our 2 bathrooms as well as working overtime & sigh real life & enough said on this subject.
Before I move on much, I would like to address a few comments from Wolf. I read your comment on road obstacles and thought about tilting and locking the tilting mechanism. At first I think that a tipping trike (1st test geometry) for the driver with holes and bumps is actually more level than a non-tipping trike. This is not to say it will not be any smoother ride without shocks, but I believe it will not tip the driver but lift them up and down due to the tilt geometry. The effect is contrarily intuitive, but I believe it is true. The impact on steering will be nothing more than what would happen to a bike. Although I have to admit that it will be different than a non-tilting trike. Secondly, I believe that you are right, that at best it would be a bad idea to be dependent on a locking mechanism that focuses entirely on the stability of the tilt. I really did not want to give you the impression that a tilt lock is the only stabilization mechanism I had in mind. I can see how that was my impression. I've known for some time that the suspension needs some kind of active system to create a roughly centered riding position on a straight road. The active system I am thinking of is a triangle of shocks and springs. This mechanism would tend to provide an upright posture on a straight ride. Last but most important, how do you stop leaning in the wrong direction on a bend? I think, part of the answer is shocks and feathers, but I do not want to rely on that alone. I think tilting requires direct driver control over tipping, not just a tipping lock, and I worked on it and looked for that solution. I think that I have found this solution and I believe that the XYZ framework is well suited for this particular solution.
At this point I would like to insert
a disclaimer. I have no really original ideas in this area of endeavor, but I assemble those designs from others with my own thoughts on how they should work. Hopefully it will get a tip-trike running. I do not claim these devices as my original work, but stand on other shoulders to reach my top shelf (LOL .... to make a phrase).
I insert this disclaimer because I have found something that seems like an original and quite brilliant idea of Martin Hill from Australia. You can watch his work on You Tube while it is available at
verfügbar ist
In short, he seems to have solved the question of how to control a tilting tricycle mechanically during steering. Martin has several video works on his EATSRHPV trike that are very instructive! I will not try to print pictures or make drawings of his prototype. I really do not think I can live up to that. I leave the viewing and analysis of this information to those readers who so desire. I'd rather talk about using his idea and about how I think
So I realize that I have not yet said exactly what makes this wonderful idea of Martin's; if You Tube did not let the cat out of the bag, I'll go into that section in this paragraph. Martin has combined the steering with the tilting technology in a single handlebar package. Sounds a bit strange, I'm sure, but that's exactly what he did. By connecting the handlebar with the tilting mechanism, the handlebars tilt simultaneously with the wheels. He used what Trike Like called "push rod steering" to control the wheel control that was attached to the tilting handlebars. In this way he can control the tilt and the turn at the same time as they are a system in his hands. Wolf this literally uses muscle power, to stabilize and control the inclination * not a brake *. It is not a direct proportional relationship between inclination and cornering, but rather the use of muscle, memory and judgment to determine the inclination. Direct proportional tilt would not work as the degree of tilt changes with speed (originally, I intended to make a blocked proportional tilt). So we use the most advanced computer in the world to control the trike ... one person. The inclination may be more or less depending on the speed and degree of rotation. In the end, it is a metastable system like a bicycle. The faster it gets, the more stable it gets. The slower you can the more unstable it becomes and thus a tipping lock is probably necessary. With a tilt lock the whole trike can not be tilted in no time. The rest of the time on a "normal" slow ride will remain stable. If you doubt, watch the videos! I think his trike is stable even at a stop, but I'm a bit conservative in my judgment until I've built a trike.
Hein, yes, the tilt may actually have to be blocked in very tight turns if it can not be held by muscles in the correct orientation on the turn. Please do not turn around!
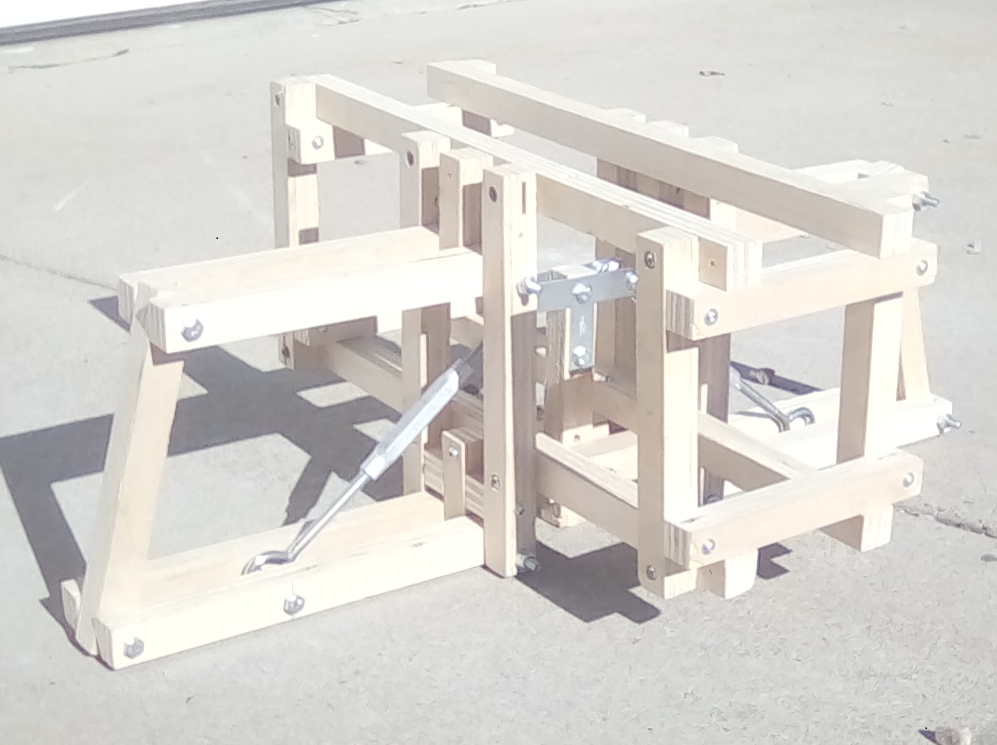
I enclose some pictures of my latest prototype based on a trike called Tripendo and a surprising number of other trikes. The model has the same geometry as all other models. It allows the illustrated turnbuckles to be replaced with shock absorbers and springs to allow tilting and full suspension travel (the turnbuckles are not strong enough so that the inclination is not equal).
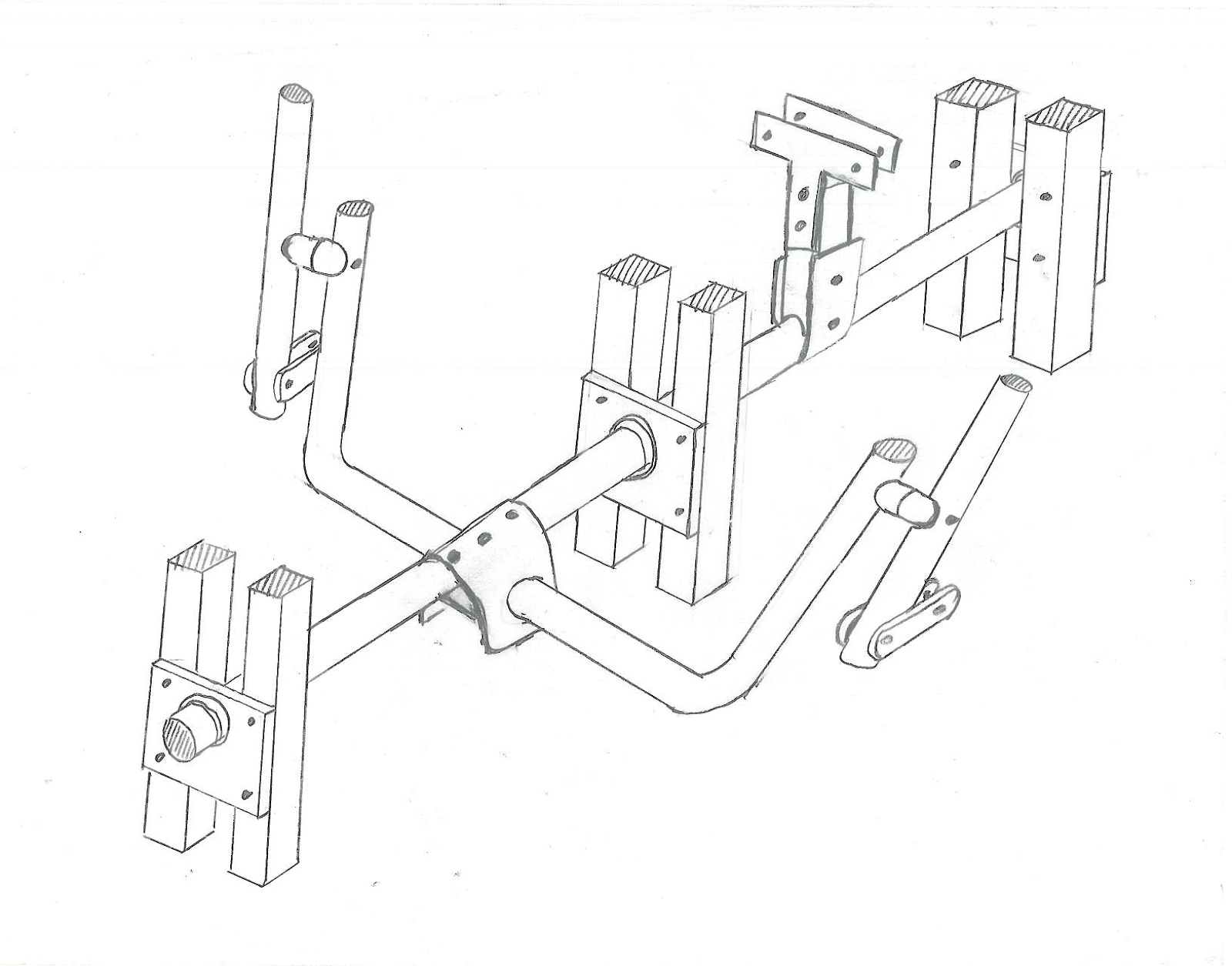
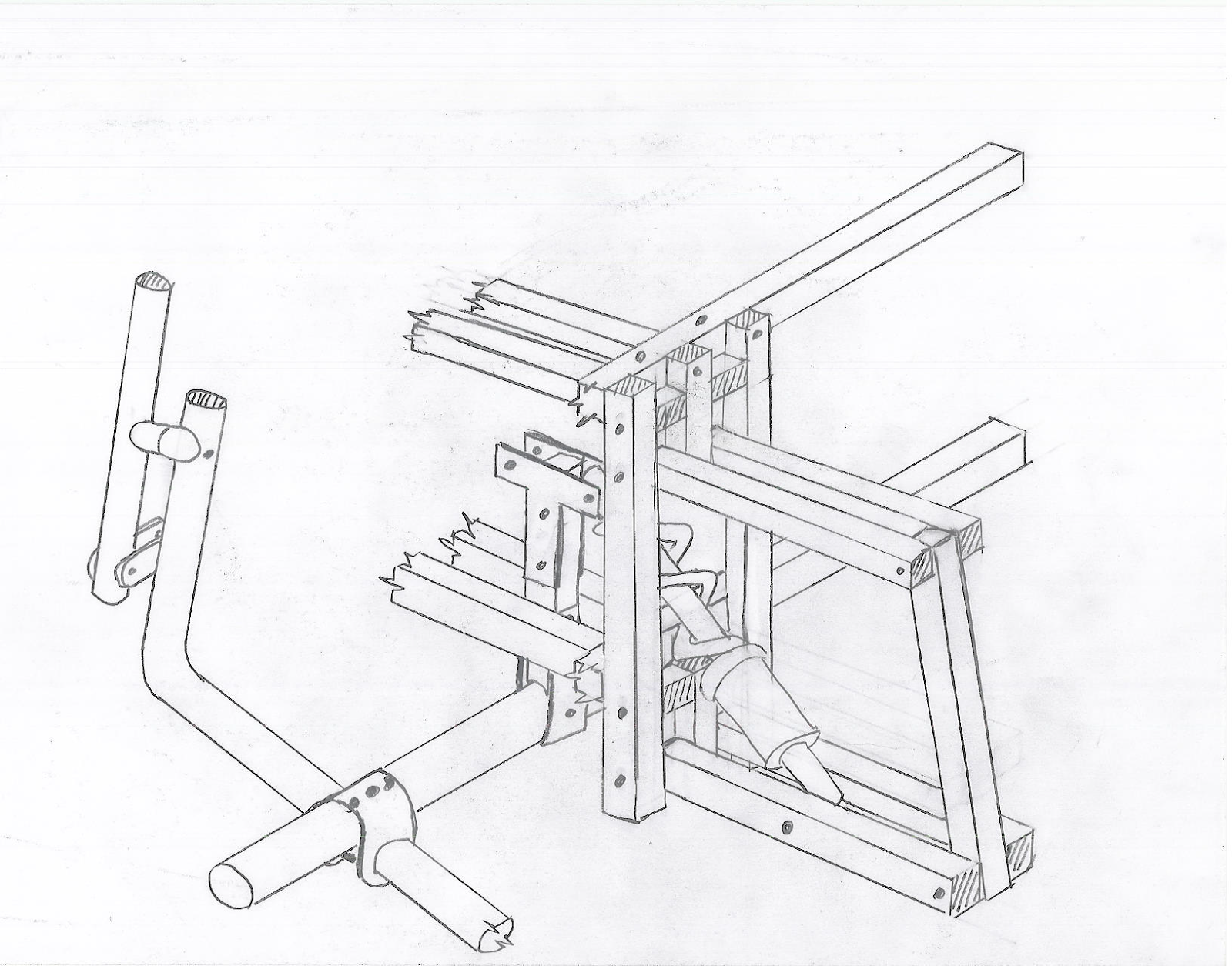
I also attach some sketches. The first should show the connection mechanism between the dump wheels and the steering column in an XYZ trike. The second sketch should show how the tilting steering column and the paddle and joystick steering (push rod steering) generally work together. I did not try to illustrate how the shortcuts work. If you want to see these links at work, go to You Tube. Unfortunately, I have to rebuild the toilets. Ta ta for now Ceeann
As usual (if I have no technical difficulties) the American version can be found at https://dichotomyone.blogspot.com/2018/02/recumbent-tadpole-trike-posts-on_26.html .
Translated with www.DeepL.com/Translator
It's been a few weeks since I've been able to say what I've done with the idea of a tiltable space frame trike, and I have a few things to share. I have built another new prototype tilting mechanism and have already developed a new version. Interestingly enough, my latest designs are very similar to what Stephan (shs2_de) worked on at the beginning of this forum. It might be interesting for Stephan and others to see a modification of this suspension system. I've also spent a considerable amount of time with my husband and a friend remodeling our 2 bathrooms as well as working overtime & sigh real life & enough said on this subject.
Before I move on much, I would like to address a few comments from Wolf. I read your comment on road obstacles and thought about tilting and locking the tilting mechanism. At first I think that a tipping trike (1st test geometry) for the driver with holes and bumps is actually more level than a non-tipping trike. This is not to say it will not be any smoother ride without shocks, but I believe it will not tip the driver but lift them up and down due to the tilt geometry. The effect is contrarily intuitive, but I believe it is true. The impact on steering will be nothing more than what would happen to a bike. Although I have to admit that it will be different than a non-tilting trike. Secondly, I believe that you are right, that at best it would be a bad idea to be dependent on a locking mechanism that focuses entirely on the stability of the tilt. I really did not want to give you the impression that a tilt lock is the only stabilization mechanism I had in mind. I can see how that was my impression. I've known for some time that the suspension needs some kind of active system to create a roughly centered riding position on a straight road. The active system I am thinking of is a triangle of shocks and springs. This mechanism would tend to provide an upright posture on a straight ride. Last but most important, how do you stop leaning in the wrong direction on a bend? I think, part of the answer is shocks and feathers, but I do not want to rely on that alone. I think tilting requires direct driver control over tipping, not just a tipping lock, and I worked on it and looked for that solution. I think that I have found this solution and I believe that the XYZ framework is well suited for this particular solution.
At this point I would like to insert
a disclaimer. I have no really original ideas in this area of endeavor, but I assemble those designs from others with my own thoughts on how they should work. Hopefully it will get a tip-trike running. I do not claim these devices as my original work, but stand on other shoulders to reach my top shelf (LOL .... to make a phrase).
I insert this disclaimer because I have found something that seems like an original and quite brilliant idea of Martin Hill from Australia. You can watch his work on You Tube while it is available at
In short, he seems to have solved the question of how to control a tilting tricycle mechanically during steering. Martin has several video works on his EATSRHPV trike that are very instructive! I will not try to print pictures or make drawings of his prototype. I really do not think I can live up to that. I leave the viewing and analysis of this information to those readers who so desire. I'd rather talk about using his idea and about how I think
So I realize that I have not yet said exactly what makes this wonderful idea of Martin's; if You Tube did not let the cat out of the bag, I'll go into that section in this paragraph. Martin has combined the steering with the tilting technology in a single handlebar package. Sounds a bit strange, I'm sure, but that's exactly what he did. By connecting the handlebar with the tilting mechanism, the handlebars tilt simultaneously with the wheels. He used what Trike Like called "push rod steering" to control the wheel control that was attached to the tilting handlebars. In this way he can control the tilt and the turn at the same time as they are a system in his hands. Wolf this literally uses muscle power, to stabilize and control the inclination * not a brake *. It is not a direct proportional relationship between inclination and cornering, but rather the use of muscle, memory and judgment to determine the inclination. Direct proportional tilt would not work as the degree of tilt changes with speed (originally, I intended to make a blocked proportional tilt). So we use the most advanced computer in the world to control the trike ... one person. The inclination may be more or less depending on the speed and degree of rotation. In the end, it is a metastable system like a bicycle. The faster it gets, the more stable it gets. The slower you can the more unstable it becomes and thus a tipping lock is probably necessary. With a tilt lock the whole trike can not be tilted in no time. The rest of the time on a "normal" slow ride will remain stable. If you doubt, watch the videos! I think his trike is stable even at a stop, but I'm a bit conservative in my judgment until I've built a trike.
Hein, yes, the tilt may actually have to be blocked in very tight turns if it can not be held by muscles in the correct orientation on the turn. Please do not turn around!
I enclose some pictures of my latest prototype based on a trike called Tripendo and a surprising number of other trikes. The model has the same geometry as all other models. It allows the illustrated turnbuckles to be replaced with shock absorbers and springs to allow tilting and full suspension travel (the turnbuckles are not strong enough so that the inclination is not equal).
I also attach some sketches. The first should show the connection mechanism between the dump wheels and the steering column in an XYZ trike. The second sketch should show how the tilting steering column and the paddle and joystick steering (push rod steering) generally work together. I did not try to illustrate how the shortcuts work. If you want to see these links at work, go to You Tube. Unfortunately, I have to rebuild the toilets. Ta ta for now Ceeann
As usual (if I have no technical difficulties) the American version can be found at https://dichotomyone.blogspot.com/2018/02/recumbent-tadpole-trike-posts-on_26.html .
Translated with www.DeepL.com/Translator

")







.jpg")


