Hallo,
Hinterrad-Lenkung birgt - falsch konstruiert -
höchstes Gefahrenpotential für Leib und Leben. Tückisch die Gefahr, und macht sich bei langsamer Fahrt erst garnicht bemerkbar!!!
Und, IMHO, hier vllt.doch besser eins nach dem andern. Das "dicke Brett" ( das Antriebskonzept ) ist ja noch nicht in Gänze als unstrittig zu erachten. Ich glaube - fast - schon dran, aber es wäre ja wohl einfach
zu schön.
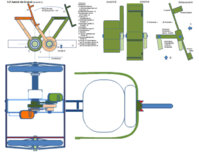
Alternativ zu XYZ-Spaceframe, sicherlich ja eine gute Idee, möchte ich auch noch eine zunächst abgespeckte Version von Lotharkos Sperrholz-Trike - mit Tischlerplatte und vllt. Dachlatten als Baumaterial - vorschlagen. Von der XYZ-HR-Lenkung, gibt's da ein Bild?
Egal was für ein Fahrwerk da irgendwann gebaut werden wird, ich für meinen Teil hier versuche, das SP-Konzept in meinem Kopf Gestalt annehmen zu lassen, soll heissen ich brauch' das in 3D ..., das wird dauern ...

MfG Frox
Danke für die Hinweise zur Hinterradlenkung! Ich denke aber, dass mit den Erfahrungen von Velayo, Bella Bike oder erwähnte andere Systeme das Problem relativ einfach gelöst werden kann. Wenn, wie ich jetzt vermute, die Dämpfungswirkung der „Armlehnen“ nicht ausreichen, kann sicher ein Dämpfungssystem in die Kegelradgetriebe-Lenkung integriert werden.
3D-Darstellung ist von mir beabsichtigt, ich suche nach einem geeigneten CAD-Programm, bei dem Standardteile wie Freiläufe, Lager, Stirnräder usw. verarbeitet werden können.
Moin!
@EgBer: Wenn Du einigermaßen Englisch kannst, würde ich Dir das Blog des Left-handed Cyclists sehr empfehlen:
http://lefthandedcyclist.blogspot.de/2012/08/ecovia-healthy-electric-hybrid-vehicle.html
Tschüs!
Hein
Danke bezüglich Hinterradlenkung, s. meinen Kommentar oben.
Hallo Eginhard,
Ich denke du unterschätzt die Beschleunigungen die nötig sind um auf den kurzen Strecken diese Geschwindigkeiten zu erreichen. Beim Tretkurbelantrieb sind es bei langsamen 60 U/min schon über 0.5g (5m/s^2) beim Knie und das bei recht gleichmäßigen Beschleunigungen über den gesamten Zyklus. Bei 80 U/min sind wir schon bei 1g, also freien Fall. Beim S-P-Antrieb ist bei gleicher Trittfrequenz eine erheblichen größere Beschleunigung nötig um auf kürzerem Weg auf die volle Geschwindigkeit zu kommen bei der die Freiläufe greifen. Besonders ineffizient wird es aber am unteren Umkehrpunkt. Während beim Tretkurbelantrieb der Fuß vom Pedal wie bei einem Pendel drehmomentneutral wieder zurück beschleunigt wird, muss das Bein beim S-P-Antrieb hier aktiv mit Muskeleinsatz wieder zurück beschleunigt werden. Diese deiner Meinung nach ungenutzten Kräfte oder uneffizienten Bereiche des Tretkurbelantrieb dienen nicht dem Vortrieb des Rades, sondern der effizienten Bewegung der Beine. Deshalb kann man auch keinen Antrieb bauen der nur den effizienten Ausschnitt des runden Tritts nutzt, weil er ohne die anderen Teile nicht existiert. Du kannst ja mal eine Tabelle oder Diagramm erstellen in der du die Position, Geschwindigkeit und Beschleunigung bei einer Trittfrequenz von z.B. 60 U/min mit dem Tretkurbelantrieb vergleichst.
Siehe
hier.
Man startet aber bei Geschwindigkeit und damit auch bei Leistung Null. Beim S-P-Antrieb kann aber nur bei voller Geschwindigkeit Kraft übertragen werden, wobei bei hoher Geschwindigkeit die Kraft langsamer aufgebaut werden kann und damit sinkt.
Zumindest beim Treppensteigen ist es angenehmer den Fuß den "Umweg" um die Stufe nehmen zu lassen.
Gruß Volker
Ich möchte hier auf die folgende Abhandlung verweisen:
„Wolfgang Petzke,
Muskelleistung und Wirkungsgrad beim Radfahren,
Leistung der Gelenkbewegungen – Erklärung zum „runden Tritt“; „
Eine ähnliche Studie war für den S-P-Antrieb ebenfalls geplant. Eine Förderung konnte jedoch nicht genehmigt werden, weil kein Prototyphersteller den Antrag gestellt hatte.
Man kann zwar die Beschleunigungen bei den Umkehrpunkten ermitteln; ich möchte jedoch auf folgende, einfach nachvollziehbare Analogmodelle verweisen:
· Der Linearantrieb benützt eine ähnliche Umkehrbewegung, ist mehrfach realisiert. Die Vorteile des S-P-Antriebes sind von mir bereits erwähnt worden.
· Der S-P-Tritt kann mit der konventionellen Tretkurbel mit Klickpedal sowohl beim Pedalfahrzeug als auch beim Heimtrainer) durchgeführt werden. Dabei erfährt man, wie schnell man wieder am Kraftpunkt ankommen und mit konstanter Geschwindigkeit weiterfahren kann, dh. die Leerlaufverluste können sehr gering gehalten werden. Der Eindruck, dass dieser Versuch anstrengender ist als der runde Tritt, trügt nicht; er rührt aber daher, dass der tretende Fuß hochgezogen werden muss und dass mit einem Fuß die doppelte Leistung eines Fußes beim runden Tritt geliefert werden muss, bzw. beim runden Tritt bringen beide Füße nacheinander das gleiche Drehmoment.
· Eine S-P (oder Linearantrieb-) Bewegung kann man mit beiden Füßen auf einer glatten Unterlage zB auf einem Tisch durchführen. Auch hier bestätigt sich die Leichtigkeit der durchaus auch schnellen Hin-und Her-Bewegung.
Das „hier“ sagt mE überhaupt nichts über das Speichern von Energie und anschließender Verwendung als externe Arbeit aus. Von einem solchen „Recyceln“ ist in dem Petzke-Artikel auch keine Rede.
Vielleicht haben andere von Euch andere Erfahrungen: Ich kann zwar Muskeln anspannen, dass diese Anspannung dann zu externen Kräften verwendet werden können, versagt sich bei mir gänzlich.
Sobald ich die Geschwindigkeit erreicht habe, kann ich genauso Kraft einleiten wie beim runden Tritt, gegen Ende der Kraftbewegung sogar noch besser, wegen des „fast“ gestreckten Beines.
Wir wollen hier nicht kleinlich werden, aber, das Vorbeibewegen an der Treppenstufe ist sicher geringer als die Kreisbewegung beim runden Tritt.
Ich denke wir können hier Jahre diskutieren ohne dass jemand beweisen kann, dass das Swing Pedal funktioniert oder nicht funktioniert. Um das zu klären wird es sich nicht vermeiden lassen, etwas Geld in die Hand zu nehmen und so einen Antrieb mal bauen zu lassen. Ich denke, dass jede Maschinenbau Firma, die Maschinen in dieser Größe konstruiert und herstellt auch so einen Antrieb bauen kann, wenn entsprechende Konstruktionszeichnungen vorliegen. Man könnte auch über ein Konstruktionsbüro gehen. Die könnten die Konstruktionszeichnungen anfertigen und hätten dann auch die Kontakte um eine Firma zu finden, die das letztendlich baut.
Da so etwas nicht umsonst zu bekommen ist, sollte überlegt werden, wie ein billigeres Zwischenziel erreicht werden kann. Evtl. lässt sich die Konstruktion so ändern, dass der Antrieb in ein herkömmliches Trike mit herkömmlichen Kettenantrieb eingebaut werden kann.
Diese Überlegung ist zwar positiv gedacht, würde mir jedoch insofern wenig gefallen, als der S-P-Antrieb ja genau die Kette auf die Hörner nimmt. Aber wenn´s sein muss…
Moin,
Beide Varianten sind IMHO machbar von einem guten Heimwerker. Bzgl. der "Zahnräder & Pedale & usw."-Geschichte fände ich's eigentlich ganz gut wenn man da weitgehend auf Standardteile wie z.B. von Fa.Mädler zurückgreifen würde.
MfG Frox
Verwendung von Standardteilen: sehe ich auch so.
@all: Ich muss mich gleich entschuldigen, es wird ein bischen untechnisch. Ich will eine Geschichte erzählen. Sie ist wahr, und sie ist so passiert. Und sie beleuchtet mein persönliches Interesse an der Sache hier.
Wenn ich den Egin-Antrieb nicht ganz falsch verstanden habe dann könnte ich diesen Stunt auf meine alten Tage relativ gefahrlos bringen. Ich will nicht dass Eginhart sich entmutigen lässt.
Wenn es sonst keiner macht fang ich mit der Zeichnungserstellung sofort an. Ich empfehle den Liegeradstammtisch München. Usw. usw.
Ach ja, war noch was? Genau: Das Lotharko-Fahrgestell kann jeder, die Egin'sche Kurbel-Tritt-Pedalerie aber?
MfG Frox
Deine Geschichte habe ich gut verstanden, insbesondere Deine Schlussfolgerung wäre für mich natürlich positiv.
Wie oben schon erwähnt, ich suche nach einem geeigneten CAD – Programm, um die Standardteile mit einbauen zu können. Ich würde gerne mit vereinten Kräften ans Werk gehen.
Nochmals danke und Gruß
Eginhard